



ņä£ļĪĀ
ņśüņāü ņ£ĀļÅä ĒĢŁļ▓Ģ ņןņ╣ś(image-guided navigation)ļŖö ļćī ņĀĢņ£ä(stereotaxy) ņłśņłĀņØś ņøÉļ”¼ņŚÉņä£ļČĆĒä░ ņŗ£ņ×æļÉśņ¢┤ 1990ļģäļīĆ ņ▓ÖņČö ņłśņłĀ ļČäņĢ╝ņŚÉ ņĀüņÜ®ļÉśļ®┤ņä£ ņ¦ĆņåŹņĀüņØĖ ņ¦äĒÖöņØś Ļ│╝ņĀĢņØä Ļ▒░ņ│É ņśżļŖśļéĀņŚÉ ņØ┤ļź┤ļĀĆļŗż. ņ┤łĻĖ░ņŚÉļŖö ņÜöņČöļČĆ ĻĖ░ĻĄ¼ Ļ│ĀņĀĢņłĀņŚÉņä£ ĻĄŁĒĢ£ņĀüņ£╝ļĪ£ ņé¼ņÜ®ļÉśņŚłņ£╝ļéś ĒĢ┤ļČĆĒĢÖņĀü ĻĄ¼ņĪ░ņāü ĻĖ░ĻĄ¼ Ļ│ĀņĀĢņØś ņĀĢĒÖĢņä▒Ļ│╝ ņĢłņĀĢņä▒ņØ┤ ņÜöĻĄ¼ļÉśļŖö ĒØēņČöņÖĆ Ļ▓ĮņČö ļČĆņ£äņØś ņłśņłĀņŚÉļÅä ņĀüņÜ®ļÉśļ®┤ņä£ Ēć┤Ē¢ēņä▒ ņ▓ÖņČöņ¦łĒÖśņØĆ ļ¼╝ļĪĀ ņ▓ÖņČö ļ│ĆĒśĢĻ│╝ ņóģņ¢æ ļČäņĢ╝ņŚÉņä£ļÅä ĻĘĖ ņé¼ņÜ®ņØ┤ ņ”ØĻ░ĆĒĢśĻ│Ā ņ׳ļŗż. ņ┤łĻĖ░ ņśüņāü ņ£ĀļÅä ĒĢŁļ▓Ģ ņןņ╣śļŖö ļ│Ąņ×ĪĒĢ£ ļō▒ļĪØ Ļ│╝ņĀĢ(registration)Ļ│╝ ņłśņłĀ ņĀä ņ╗┤Ēō©Ēä░ ļŗ©ņĖĄņ┤¼ņśüņØ┤ ĒĢäņÜöĒĢśĻ│Ā, ņ╗┤Ēō©Ēä░ ņĪ░ņ×æņØś ļČłĒÄĖĒĢ© ļō▒ņØś ņØ┤ņ£ĀņÖĆ ņłśņłĀ ņŗ£Ļ░äņØś ņ¦ĆņŚ░ ļ░Å ĒĢÖņŖĄ Ļ│ĪņäĀ(learning curve)ņØś ĒĢäņÜöņä▒ ļĢīļ¼ĖņŚÉ ņé¼ņÜ®ņØä Ļ║╝ļĀżĒĢśĻĖ░ļÅä Ē¢łļŗż. ĒĢśņ¦Ćļ¦ī Ļ┤ĆļĀ©ļÉ£ ĻĖ░ņłĀņØś ļ╣äņĢĮņĀüņØĖ ļ░£ņĀäĻ│╝ ņ¦ĆņåŹņĀüņØĖ ļ¼ĖņĀ£ņĀÉ ļ│┤ņĢłĻ│╝ ļŹöļČłņ¢┤ ņØĖĻ│Ąņ¦ĆļŖź(artificial intelligence), ņ”ØĻ░Ģ Ēśäņŗż(virtual reality), ĒÖĢņן Ēśäņŗż(extended reality) ļ░Å ļĪ£ļ┤ć ĻĖ░ņłĀ(robotic technology) ļō▒ņØś ņ£ĄĒĢ®ņ£╝ļĪ£ Ēśäņ×¼ļŖö ņŚåņ¢┤ņä£ļŖö ņĢł ļÉśļŖö ņŻ╝ņÜö ļ│┤ņĪ░ ņłśņłĀ ĻĖ░ĻĄ¼ļĪ£ Ļ▒░ļōŁļéśĻ│Ā ņ׳ļŗż. ņØ┤ņŚÉ ļ│Ė ņĀĆņ×ÉļŖö ņśüņāü ņ£ĀļÅä ĒĢŁļ▓Ģ ņןņ╣śņØś ĻĄ¼ņä▒ņÜöņåīņÖĆ ņé¼ņÜ® ņĀłņ░©ņØś ĻĖ░ļ│ĖņØä ņĀĢļ”¼ĒĢśņŚ¼ ņ×äņāüņĀü ņ£ĀņÜ®ņä▒ņØä ņĢīļ”¼ļŖö ĒĢ£ĒÄĖ ņ¢┤ļ¢ĀĒĢ£ ņÜöņåīļōżņØś ļŗ©ņĀÉņØä ļ│┤ņÖäĒĢśņŚ¼ ņé¼ņÜ®ņ×É ņĖĪļ®┤ņŚÉņä£ ļ│┤ļŗż ņÖäļ▓ĮĒĢ£ ĻĖ░ņłĀ Ļ░£ļ░£ņŚÉ ļÅäņøĆņØ┤ ļÉśļŖöņ¦Ć ņĢīņĢäļ│┤Ļ│Āņ×É ĒĢ£ļŗż.
ļ│ĖļĪĀ
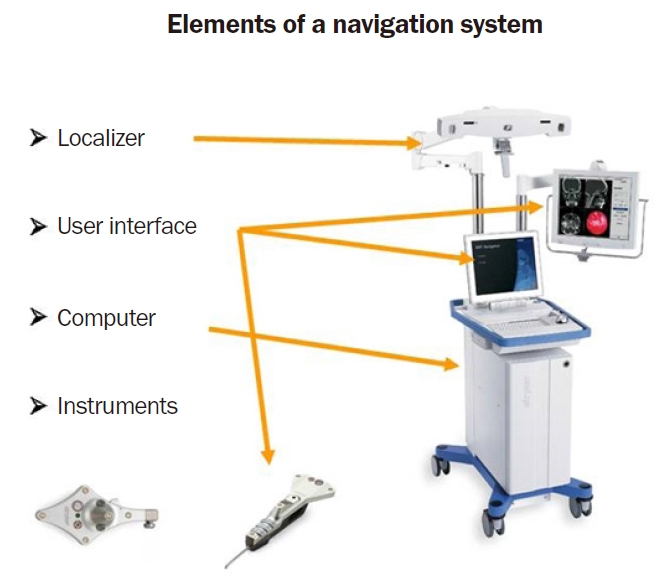
ņśüņāü ņ£ĀļÅä ĒĢŁļ▓Ģ ņןņ╣śņØś ĻĄ¼ņä▒ņÜöņåī(Fig. 1)
ņÜ░ņäĀ ņśüņāü ņ£ĀļÅä ĒĢŁļ▓Ģ ņןņ╣śņØś ĻĖ░ļ│ĖņĀüņØĖ ĻĄ¼ņä▒ņØĆ ņśüņāüņØä ņ▓śļ”¼ĒĢśĻ│Ā ņĀäņ▓┤ņĀüņØĖ ņŗ£ņŖżĒģ£ņØä ņĀ£ņ¢┤ĒĢśļŖö ņÜ┤ņśüņ▓┤ņĀ£(operating system)ļź╝ Ēāæņ×¼ĒĢ£ ļŗ©ļ¦É ņןņ╣ś(workstation)ņÖĆ ņŗ£ņŖżĒģ£Ļ│╝ ņé¼ņÜ®ĒĢśļŖö ĻĖ░ĻĄ¼ļōż Ļ░äņØś ņåīĒåĄņØä ņ¦ĆņåŹņĀüņ£╝ļĪ£ ņ£Āņ¦ĆĒĢśļŖö ņŗĀĒśĖ Ļ░Éņ¦ĆĻĖ░(localizer)ņØ┤ļŗż. ņØ┤ļĢī, ņŻ╝ļĪ£ ņé¼ņÜ®ļÉśļŖö ņŗĀĒśĖļŖö ņĀüņÖĖņäĀ(infrared ray)Ļ│╝ ņ×ÉĻĖ░ņן(magnetic)ņØĖļŹ░, ņĀüņÖĖņäĀņØä ņé¼ņÜ®ĒĢĀ ļĢīļŖö Ļ┤æĒĢÖ ņ╣┤ļ®öļØ╝(optical camera)Ļ░Ć ĒĢäņłśņĀüņØ┤ļŗż. Ļ┤æĒĢÖ ņ╣┤ļ®öļØ╝ļŖö ĒĢŁļ▓Ģ ņ£ĀļÅä ĒāÉņ╣©(navigational probe)Ļ│╝ ņłśņłĀņŚÉ ņé¼ņÜ®ļÉśļŖö ĻĖ░ĻĄ¼ņŚÉņä£ ļ░£ņāØĒĢśļŖö ņĀüņÖĖņäĀņØä ĒāÉņ¦ĆĒĢśļŖö ņŚŁĒĢĀņØä ĒĢśĻ▒░ļéś ļ░śļīĆļĪ£ ņĀüņÖĖņäĀņØä ļ░®ņČ£ĒĢśņŚ¼ ĒāÉņ╣©ņØ┤ļéś ņĀĢĒĢ┤ņ¦ä ņłśņłĀ ĻĖ░ĻĄ¼ļĪ£ļČĆĒä░ ļ░śņé¼ļÉśļŖö ņŗĀĒśĖļź╝ ļ░øņĢä ĻĖ░ĻĄ¼ņØś ļüØņØ┤ ņ£äņ╣śĒĢ£ ņ▓ÖņČöņØś ĒĢ┤ļČĆĒĢÖņĀü ņ£äņ╣śļź╝ ĒīīņĢģĒĢśĻ▓ī ļÉ£ļŗż. ļśÉ ļŗżļźĖ ĻĄ¼ņä▒ņÜöņåī ņżæ ĒĢśļéśļŖö ņØ┤ ļŗ©ļ¦ÉĻĖ░ļź╝ ņĀ£ņ¢┤ĒĢśļŖö ņןņ╣śņØĖ ņé¼ņÜ®ņ×É ņØĖĒä░ĒÄśņØ┤ņŖż(user interface)ļØ╝Ļ│Ā ĒĢśļŖöļŹ░, ļ¦łņÜ░ņŖż(mouse)ļéś ļ░£ ņŖżņ£äņ╣ś(foot switch)ņŚÉņä£ ņŗ£ņ×æļÉśņ¢┤ ņøÉĻ▓®ņĀ£ņ¢┤ ĻĖ░ĻĄ¼(smart remote)ļéś Ēä░ņ╣śņŖżĒü¼ļ”░(touch screen) ļō▒ņ£╝ļĪ£ ņé¼ņÜ®ņ×ÉĻ░Ć ĒÄĖļ”¼ĒĢśļÅäļĪØ Ļ░£ļ░£ļÉśņ¢┤ ņé¼ņÜ®ņżæņØ┤ļŗż. ļśÉĒĢ£ ņ▓ÖņČö ņłśņłĀņŚÉļŖö ĻĖ░ņżĆņĀÉņØä ĒÖĢļ│┤ĒĢ┤ņĢ╝ ĒĢśļŖö ņØ┤ņ£Ā ļĢīļ¼ĖņŚÉ ņČöņĀü ņןņ╣ś(tracking device)Ļ░Ć ĒĢäņÜöĒĢśļŗż. ņØ┤ļĢī ņČöņĀü ņןņ╣śļŖö ĻĘ╣ļÅīĻĖ░ ļō▒ņØś ļģĖņČ£ļÉśņ¢┤ ņ׳ļŖö ļČĆņ£äņŚÉ ļŗ©ļŗ©Ē׳ Ļ│ĀņĀĢļÉśņ¢┤ņĢ╝ ĒĢśļŖöļŹ░, ņłśņłĀ ņżæ ņøĆņ¦üņ×äņ£╝ļĪ£ ņ┤łļלļÉśļŖö ņśżļźśļź╝ ĻĘ╣ļ│ĄĒĢśĻĖ░ ņ£äĒĢ┤ņä£ ņāłļĪ£ņÜ┤ ņןņ╣śļōżņØ┤ Ļ░£ļ░£ļÉśĻ│Ā ņ׳ļŗż. ņØ┤ ņÖĖņŚÉļÅä ņŚ¼ļ¤¼ ĻĖ░ĻĄ¼ļź╝ ņé¼ņÜ®ĒĢĀ ļĢīļ¦łļŗż ļŗ©ļ¦É ņןņ╣śņŚÉ ĻĖ░ĻĄ¼ņŚÉ ļīĆĒĢ£ ņĀĢļ│┤ļź╝ ņ×ģļĀźĒĢśĻĖ░ ņ£äĒĢ┤ņä£ ĻĄÉņĀĢ ņןņ╣ś(calibration device)ļōżņØ┤ ĒĢäņÜöĒĢśļŗż.
ņśüņāü ņ£ĀļÅä ĒĢŁļ▓Ģ ņןņ╣śņØś ņé¼ņÜ® ņĀłņ░©
Ēśäņ×¼Ļ╣īņ¦Ć ņśüņāü ņ£ĀļÅä ĒĢŁļ▓Ģ ņןņ╣śņØś ļ░£ņĀäĻ│╝ņĀĢņØä 3ļŗ©Ļ│ä ņäĖļīĆ(generation)ļĪ£ ĻĄ¼ļČäņ¦Ćņ¢┤ ņäżļ¬ģĒĢśĻ│Ā ņ׳ļŖöļŹ░, 1ņäĖļīĆļŖö ņłśņłĀ ņĀä ņ╗┤Ēō©Ēä░ ļŗ©ņĖĄņ┤¼ņśüņØä ĒåĄĒĢ┤ņä£ ņ¢╗ņØĆ ņśüņāüņØä ņØ┤ņÜ®ĒĢ£ ĒĢŁļ▓Ģ ņןņ╣śļĪ£ņä£, 3ņ░©ņøÉņĀüņØĖ ĒĢ┤ļČĆĒĢÖņĀü ĒśĢĒā£ļź╝ ņ¢╗ņØä ņłś ņ׳ņ£╝ļéś ņłśņłĀ ņĀä ĒśĢĒā£ļ¦īņØä ļ░śņśüĒĢśĻĖ░ ļĢīļ¼ĖņŚÉ ņłśņłĀ ņżæ Ļ│ĄĻ░äņØś ļ│ĆĒÖöļź╝ Ļ░Éņ¦ĆĒĢśņ¦Ć ļ¬╗ĒĢ┤ ļŗżņåīņØś ņśżņ░©ļź╝ Ļ░ÉņłśĒĢ┤ņĢ╝ ĒĢ£ļŗż. ņØ┤ ļŗ©ņĀÉņØä ĻĘ╣ļ│ĄĒĢśĻĖ░ ņ£äĒĢ┤ ļ░£ņĀäļÉ£ 2ņäĖļīĆ Ēł¼ņŗ£ ņśüņāü ņ£ĀļÅä ĒĢŁļ▓Ģ ņןņ╣ś(fluoroscopy-guided navigation)ļŖö ņłśņłĀņżæ ņŗżņŗ£Ļ░ä ņśüņāüņØä ņ¢╗ņØä ņłś ņ׳Ļ│Ā, ņ×ÉļÅÖņĀüņØĖ ļō▒ļĪØņØ┤ Ļ░ĆļŖźĒĢśļ®░, ņןņ╣ś ņäżļ╣ä ņŗ£Ļ░äņØ┤ ņ¦¦ņĢä ļ░®ņé¼ņäĀ ļģĖņČ£ ņĀĢļÅäļź╝ ņżäņØ╝ ņłś ņ׳ņ£╝ļéś 2ņ░©ņøÉņĀüņØĖ ņśüņāüļ░¢ņŚÉ ņ¢╗ņØä ņłś ņŚåļŖö ļŗ©ņĀÉņØä ļģĖņČ£ĒĢśņśĆļŗż. Ļ▓░ĻĄŁ ņĄ£ĻĘ╝ņŚÉļŖö ņØ┤ ļæÉ Ļ░Ćņ¦ĆņØś ņן, ļŗ©ņĀÉņØä ļ│┤ņÖäĒĢ£ ņ╗┤Ēō©Ēä░ ļŗ©ņĖĄ/Ēł¼ņŗ£ ņśüņāü ļ│ĄĒĢ®ĒśĢņØś ņ£ĀļÅä ĒĢŁļ▓Ģ ņןņ╣ś(computed tomography/fluoro hybrid navigation)Ļ░Ć Ļ░£ļ░£ļÉśņ¢┤ 3ņäĖļīĆļĪ£ ņé¼ņÜ® ņżæņØ┤ļ®░, ĻĖ░ņĪ┤ņØś ņśżņ░© ļ▓öņ£äļź╝ ņ£ĀņØśĒĢśĻ▓ī ņżäņØ╝ ņłś ņ׳ņØä ļ┐É ņĢäļŗłļØ╝ ņé¼ņÜ® ņĀłņ░©Ļ░Ć Ļ░äņåīĒÖöļÉ£ ņןņĀÉņØ┤ ņ׳ļŗż. Ēśäņ×¼ ņ▓ÖņČö ņłśņłĀņŚÉ ņé¼ņÜ® ņżæņØĖ ņśüņāü ņ£ĀļÅä ĒĢŁļ▓Ģ ņןņ╣śļŖö Airo Mobile Intraoperative Computed Tomography-Based Spinal Navigation (Brainlab, Feldkrchen, Germany), Stryker Spinal Navigation with SpineMask Tracker and SpineMap Software (Stryker, Kalamazoo, MI, USA), Stealth Station Spinal Surgery Imaging and Surgical Navigation with O-arm (Medtronic, Minneapolis, MN, USA), ĻĘĖļ”¼Ļ│Ā Ziehm Vision FD Vario 3-Dimensional with NaviPort Integration (Ziehm Imaging, Orlando, FL, USA) ļō▒ņØ┤ ņ׳ļŖöļŹ░, Ļ░üĻ░üņØś ļ»ĖņäĖĒĢ£ ĻĄ¼ņä▒ņÜöņåīĻ░Ć ņĪ░ĻĖłņö® ņ░©ņØ┤Ļ░Ć ņ׳Ļ│Ā, ņØ┤ļĪ£ ņØĖĒĢ£ ņé¼ņÜ® ņĀłņ░©ļÅä ļŗżļź┤ļŗż. ņØ┤ ļģ╝ļ¼ĖņŚÉņä£ļŖö Ļ░Ćņן ĻĖ░ļ│ĖņĀüņØĖ 1ņäĖļīĆņØś ņśüņāü ņ£ĀļÅä ĒĢŁļ▓Ģ ņןņ╣śņØś ņé¼ņÜ® ņĀłņ░©ļź╝ ņäżļ¬ģĒĢśĻ│Āņ×É ĒĢśļ®░, ņ¢┤ļ¢ż ļŗ©Ļ│äĻ░Ć ĒĢŁļ▓Ģ ņןņ╣śņØś ļ░£ņĀäņŚÉ ļö░ļØ╝ņä£ ņČĢņåīļÉśĻ▒░ļéś ņāØļץļÉśņŚłļŖöņ¦Ćļź╝ ņØ┤ĒĢ┤ņŗ£ĒéżĻ│Āņ×É ĒĢ£ļŗż [1].
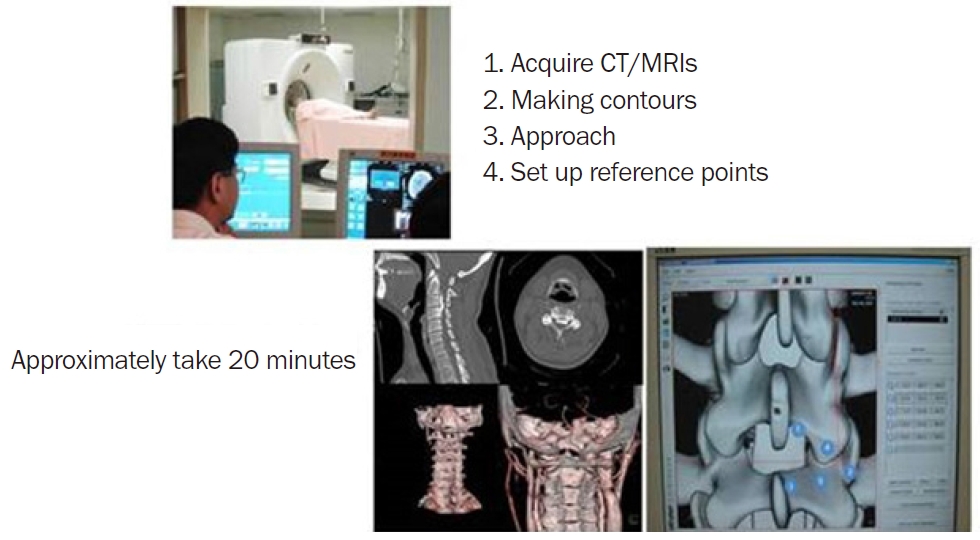
ņłśņłĀ ņĀä Ļ│äĒÜŹ(Fig. 2)
ņłśņłĀ ļČĆņ£äņØś ņśüņāüņØä ņ¢╗ĻĖ░ ņ£äĒĢ┤ ņŻ╝ļĪ£ ņ╗┤Ēō©Ēä░ ļŗ©ņĖĄņ┤¼ņśüņØä ņŗ£Ē¢ēĒĢśļŖöļŹ░, ņłśņłĀĒĢśĻ│Āņ×É ĒĢśļŖö ļČĆņ£äņØś 1-2 ļĀłļ▓© ņ£äņĢäļלļĪ£ ņČ®ļČäĒĢ£ ļČĆņ£äļź╝ ņ┤¼ņśüĒĢśļ®░, ņŚ░ņåŹņä▒ ņØ┤ļ»Ėņ¦ĆļĪ£ ņ┤¼ņśüĒĢśļŖö Ļ▓āņØ┤ ņøÉņ╣ÖņØ┤Ļ│Ā, 1 mm Ļ░äĻ▓®ņØś ņ┤śņ┤śĒĢ£ Ļ░äĻ▓®ņØ┤ ĻČīņןļÉ£ļŗż. ņłśņłĀņŗżņŚÉņä£ļŖö ņ┤¼ņśüļÉ£ ņśüņāü ņØ┤ļ»Ėņ¦Ćļź╝ ņśüņāü ņ£ĀļÅä ĒĢŁļ▓Ģ ņןņ╣śņØś ņ╗┤Ēō©Ēä░ ļŗ©ļ¦ÉĻĖ░ņŚÉ ņĀĆņןĒĢśĻ│Ā, ņØ┤ ņØ┤ļ»Ėņ¦ĆļōżņØä ļ¬©ļŗłĒä░ņŚÉņä£ ĒÖĢņØĖĒĢśļ®┤ņä£ ņŗ£ņāüļ®┤(sagittal), ņČĢļ®┤(axial), Ļ┤Ćņāüļ®┤(coronal) ļ░Å 3ņ░©ņøÉ ņØ┤ļ»Ėņ¦Ć(3-dimensional image)ļź╝ ļ¬©ļæÉ ĒÖĢļ│┤ĒĢśĻ│Ā, ņŗżņĀ£ ņłśņłĀ ļČĆņ£äņÖĆ ļČĆĒĢ®ļÉśļŖö ņłśĻ░£ņØś ņ░ĖĻ│Ā ņĀÉ(reference point)ņØä Ēæ£ņŗ£ĒĢ£ļŗż. ņØ┤ļĢī ņłśņłĀņ×ÉļŖö ĒÖśņ×ÉņØś ņØ┤ļ»Ėņ¦ĆĻ░Ć ļ¦×ļŖöņ¦Ć, ļ░®Ē¢źņØ┤ ņĀĢĒÖĢĒĢ£ņ¦Ć, ņÖ£Ļ│ĪļÉ£ ņØ┤ļ»Ėņ¦ĆĻ░Ć ņŚåļŖöņ¦Ć, ņłśņłĀ ļČĆņ£äĻ░Ć ņČ®ļČäĒ׳ ĒżĒĢ©ļÉśņ¢┤ ņ׳ļŖöņ¦Ć ĒÖĢņØĖĒĢ┤ņĢ╝ ĒĢ£ļŗż. ņØ┤ ņĀłņ░©ļŖö 2, 3ņäĖļīĆ ņ£ĀļÅä ĒĢŁļ▓Ģ ņןņ╣ś ņé¼ņÜ® ņŗ£ņŚÉļŖö ņŗżņŗ£Ļ░ä ņśüņāüņ×ÉļŻī ĒÖĢļ│┤ļĪ£ ņāØļץļÉ£ļŗż [2].
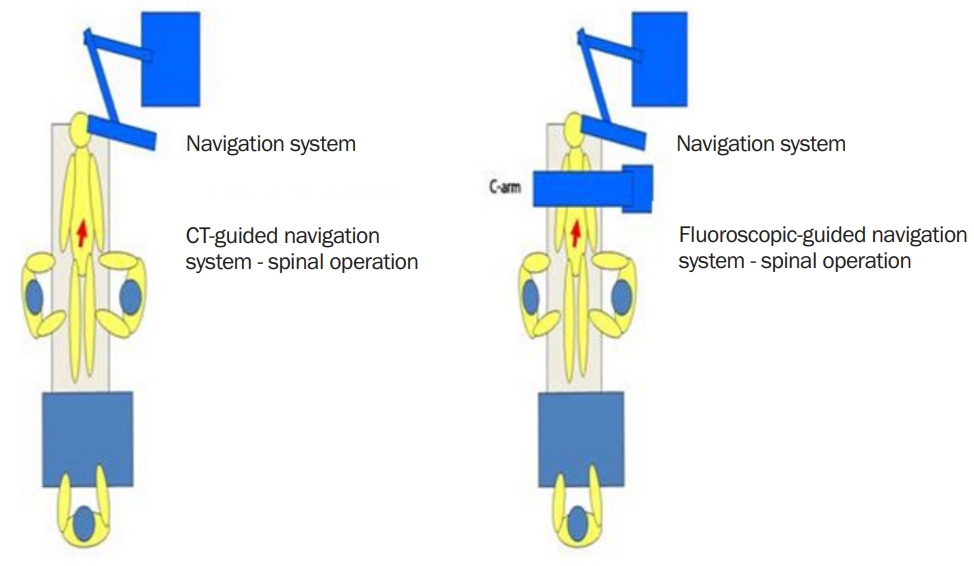
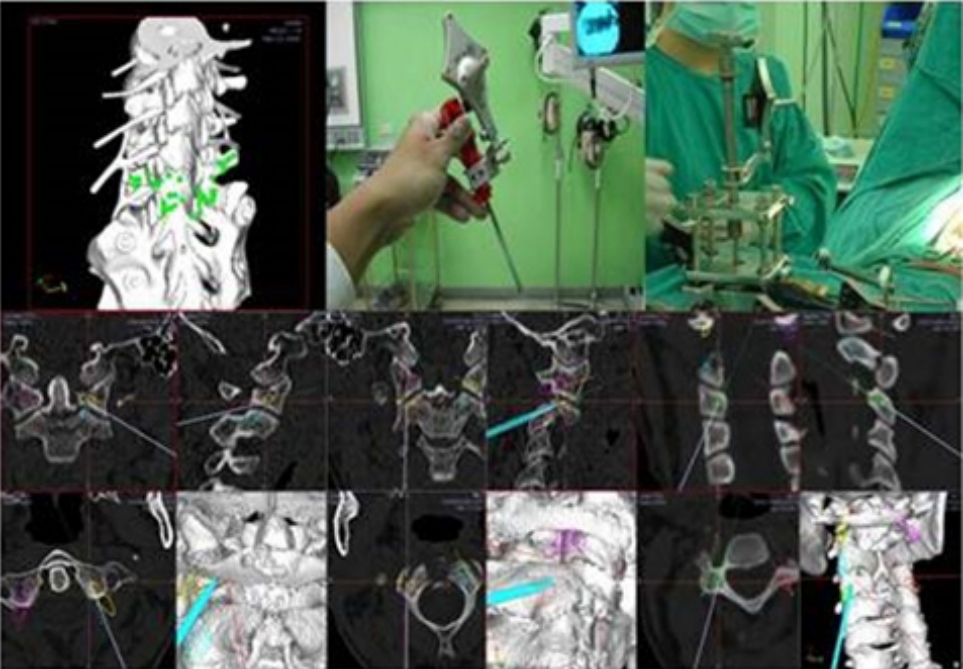
ņłśņłĀņŗżņŚÉņä£ņØś ņäżņ╣ś(Fig. 3)
ņÜ░ņäĀ ņśüņāü ņ£ĀļÅä ĒĢŁļ▓Ģ ņןņ╣śņÖĆ ņłśņłĀļīĆ ļ░Å ņłśņłĀņ×ÉņØś ņ£äņ╣śļź╝ Ļ▓░ņĀĢĒĢśļŖöļŹ░, ļ│┤ĒåĄ ņłśņłĀņ×ÉĻ░Ć ņłśņłĀ ņŗ£ņĢ╝ņÖĆ ļ¬©ļŗłĒä░ļź╝ ļ╣ĀļźĖ ņŗ£Ļ░ä ļé┤ņŚÉ ĒÖĢņØĖĒĢĀ ņłś ņ׳ļÅäļĪØ ĒÖśņ×ÉņØś ļ©Ėļ”¼ ņ¬ĮņŚÉ ĻĖ░ĻĄ¼ļź╝ ņäżņ╣śĒĢśļŖö Ļ▓āņØ┤ ņóŗņ£╝ļ®░, Ļ┤æĒĢÖ ņ╣┤ļ®öļØ╝ ņé¼ņÜ® ņŗ£ ņłśņłĀ ņŗ£ņĢ╝ņÖĆ ņ╣┤ļ®öļØ╝ ņé¼ņØ┤ņŚÉ ļ░®ĒĢ┤Ļ░Ć ļÉśļŖö ļ¼╝Ļ▒┤ņØä ņĀĢļ”¼ĒĢśļŖö Ļ▓āņØ┤ ņżæņÜöĒĢśļŗż. ņØ┤ļĢī 2ņäĖļīĆ Ēł¼ņŗ£ ņśüņāü ņ£ĀļÅä ĒĢŁļ▓Ģ ņןņ╣śļéś 3ņäĖļīĆ ĒĢŁļ▓Ģ ņןņ╣śļź╝ ņé¼ņÜ®ĒĢĀ ļĢīļŖö ņŗżņŗ£Ļ░ä ņśüņāüņ×ÉļŻīļź╝ ņ¢╗ĻĖ░ ņ£äĒĢ┤ ņ┤¼ņśüĒĢ┤ņĢ╝ ĒĢĀ ĻĖ░ĻĄ¼Ļ░Ć ņ¦äņ×ģĒĢśļŖö Ļ│ĄĻ░äņØä ĒÖĢļ│┤ĒĢ┤ņĢ╝ ĒĢ£ļŗż [3].
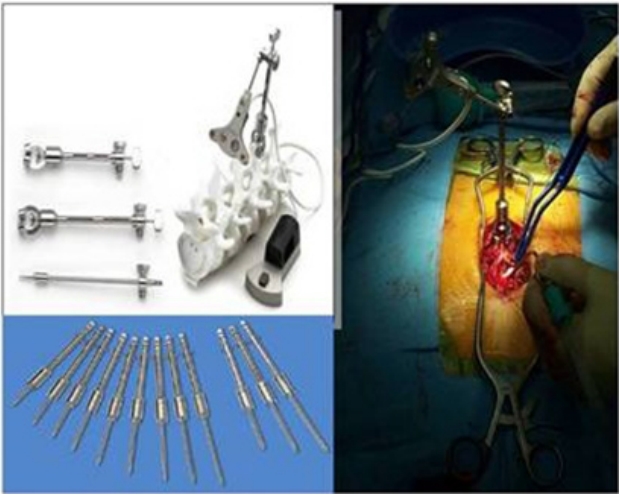
ņłśņłĀ ņŗ£ņĢ╝ ņåīļÅģ, ņłśņłĀ ļČĆņ£ä ņĀłĻ░£, ĒÖśņ×É ņČöņĀü ņןļ╣ä ņäżņ╣ś(Fig. 4)
ņČöņĀü ņןņ╣śļŖö ņČ®ļČäĒĢ£ ņłśņłĀ ņŗ£ņĢ╝ļź╝ ĒÖĢļ│┤ĒĢśĻ│Ā ņŗĀĒśĖļź╝ ņÜ®ņØ┤ĒĢśĻ▓ī ņĀäļŗ¼ĒĢĀ ņłś ņ׳ļÅäļĪØ Ļ░Ćņן ļģĖņČ£ļÉ£ ļČĆņ£äņŚÉ, ĻĘĖļ”¼Ļ│Ā ņłśņłĀņżæ ņé¼ņÜ®ņ×ÉļōżļĪ£ļČĆĒä░ ņČ®ļÅīĒĢśļŖö ņØ╝ņØä ļ░®ņ¦ĆĒĢśĻĖ░ ņ£äĒĢ┤ ņłśņłĀ ļČĆņ£äņŚÉņä£ Ļ░Ćņן ļ©Ėļ”¼ņ¬ĮņØś ĻĘ╣ļÅīĻĖ░ļź╝ ņäĀņĀĢĒĢśņŚ¼ ņןņ╣śļź╝ ņĄ£ļīĆĒĢ£ Ļ░ĢĒĢśĻ▓ī ņäżņ╣śĒĢ£ļŗż.
ļō▒ļĪØ Ļ│╝ņĀĢ(Fig. 5)
ņØ┤ ņĀłņ░©ļŖö ņłśņłĀ ņĀä ņśüņāüņ×ÉļŻīņÖĆ ņØ┤ņÖĆ ļČĆĒĢ®ļÉśļŖö ĒĢ┤ļČĆĒĢÖņĀü ĻĄ¼ņĪ░ņØś ņ£äņ╣ś Ļ┤ĆĻ│äļź╝ ņĀĢĒĢ┤ņ¦ä ņłśĒĢÖņĀü Ļ│ĄņŗØņŚÉ ļö░ļØ╝ ņØ╝ņ╣śņŗ£ĒéżļŖö ņ×æņŚģņ£╝ļĪ£ Ļ░Ćņן ņżæņÜöĒĢ£ Ļ│╝ņĀĢņØ┤ļØ╝ ĒĢĀ ņłś ņ׳ļŗż. ņĄ£ņåīĒĢ£ ņäĖ ĒżņØĖĒŖĖļź╝ ņØ╝ņ╣śņŗ£ĒéżļŖö Ļ▓āņØ┤ ĻĖ░ļ│ĖņØ┤ļ®░, ĒāÉņ╣©ņØś ļüØņØä ņłśņłĀ ņŗ£ņĢ╝ņŚÉņä£ ņłĀ ņĀä ĒĢ┤ļČĆĒĢÖņĀü ņĀĢļ│┤ņÖĆ ļ»Ėļ”¼ ņØ╝ņ╣śļÉśņ¢┤ ņ׳ļŖö ļČĆņ£äņŚÉ ļåōĻ│Ā ņ╗┤Ēō©Ēä░ ļŗ©ļ¦ÉĻĖ░ņŚÉ ļō▒ļĪØņŗ£Ēé©ļŗż. ņØ┤ļź╝ ĒĢ£ ņīŹņĀÉ(paired-point) ļō▒ļĪØņØ┤ļØ╝Ļ│Ā ĒĢśļ®░ ļō▒ļĪØņØ┤ ļüØļéśļ®┤ ņ×ÉļÅÖņ£╝ļĪ£ ņ╗┤Ēō©Ēä░ņŚÉņä£ ņśżļźśņØś ņĀĢļÅäļź╝ ņé░ņČ£ĒĢśņŚ¼ ņĀ£ņŗ£ĒĢśļŖöļŹ░, ņśżņ░© ļ▓öņ£äĻ░Ć 1 mm ļé┤ņÖĖļ®┤ ĻĘĖ ņĀĢĒÖĢņä▒ņØ┤ ĒŚłņÜ®ļÉĀ ņłś ņ׳ļŗż. ņĪ░ĻĖł ļŹö ņĀĢļ░ĆĒĢ£ ļō▒ļĪØ ļŗ©Ļ│äļź╝ ņČöĻ░ĆĒĢśļŖöļŹ░, ņØ┤ļź╝ Ēæ£ļ®┤ ņĀ£ņ×æ(surface mapping)ņØ┤ļØ╝ ĒĢśĻ│Ā, ņłśņłĀ ņŗ£ņĢ╝ņŚÉņä£ ņ¦üņĀæ ņŚ¼ļ¤¼ Ļ░£ņØś ĒĢ┤ļČĆĒĢÖņĀü ņ¦ĆņĀÉņØä ņĢĮ 30Ļ░£ņØś ĒżņØĖĒŖĖļĪ£ ņ¦ĆņĀĢĒĢśĻ▓ī ļÉ£ļŗż. ņĄ£ĻĘ╝ņŚÉļŖö ņØ┤ļź╝ ņ×ÉļÅÖņ£╝ļĪ£ ņ╗┤Ēō©Ēä░Ļ░Ć ņØĖņ¦ĆĒĢśņŚ¼ ņ¢┤ļŖÉ ņĀĢļÅäņØś ņĀĢĒÖĢļÅäĻ░Ć ņØĖņ¦ĆļÉśļ®┤ ņ¦¦ņØĆ ņŗ£Ļ░ä ļé┤ņŚÉ Ļ│╝ņĀĢņØä ļ¦łņ╣Ā ņłś ņ׳ļŗż. ļ¬©ļōĀ ļō▒ļĪØ Ļ│╝ņĀĢņŚÉņä£ļÅä ļČĆņĀĢĒÖĢĒĢ£ ņĀĢļ│┤ļź╝ ņĄ£ņåīĒĢ£ ņżäņØ┤ĻĖ░ ņ£äĒĢ┤ņä£ļŖö ņłśņłĀ ļČĆņ£äņŚÉ ņןņ░®ĒĢśļŖö ĻĖ░ĻĄ¼Ļ░Ć ņĀüņÖĖņäĀ ĒāÉņ¦ĆĻĖ░ņÖĆ ņĀĢĒÖĢĒĢśĻ▓ī ņØ╝ņ╣śĒĢśļÅäļĪØ ĒĢ┤ļČĆĒĢÖņĀü ĻĄ¼ņĪ░ņāü ņĄ£ļīĆĒĢ£ ļģĖņČ£ļÉśņ¢┤ ņ׳ļŖö ņןņåīņŚÉ ļČĆņ░®ļÉśņ¢┤ņĢ╝ ĒĢśĻ│Ā, ļśÉĒĢ£ ĒØöļōżļ”╝ ņŚåņØ┤ Ļ░ĢĒĢśĻ▓ī Ļ│ĀņĀĢļÉśņ¢┤ ņ׳ņ¢┤ņĢ╝ ĒĢ£ļŗż [4].
ņłśņłĀ
ņ▓ÖņČö ņłśņłĀņØĆ ņŚ¼ļ¤¼ Ļ░Ćņ¦Ć ņóģļźśņØś ĻĖ░ĻĄ¼ ņé¼ņÜ®ņØ┤ ļČłĻ░ĆĒö╝ĒĢśņŚ¼ ņØ┤ļź╝ ļ│ĆĻ▓Į ņŗ£ņŚÉļŖö ļ░śļō£ņŗ£ ļŗ©ļ¦ÉĻĖ░ņŚÉ ņé¼ņÜ® ņĀä ņŗĀĒśĖļź╝ ļ│┤ļé┤ņĢ╝ ĒĢśĻ│Ā, ņłśņłĀ ņżæ ņśüņāü ņ£ĀļÅä ĒĢŁļ▓Ģ ņןņ╣śņØś ļČĆņĀĢĒÖĢņä▒ņØä ņ£Āļ░£ĒĢśļŖö ļ¼ĖņĀ£ņĀÉņØ┤ ļ░£ņāØĒĢĀ ņŗ£, ĒŖ╣Ē׳ ĒÖśņ×ÉņŚÉĻ▓ī ļČĆņ░®ļÉ£ ņČöņĀü ņןņ╣śņØś ņ£äņ╣ś ļ│ĆĻ▓ĮņØ┤ļéś ĒĢ┤ļČĆĒĢÖņĀü ĻĄ¼ņĪ░ņØś ļ│ĆĒÖöĻ░Ć Ļ░Éņ¦ĆļÉśļ®┤ ņ×¼ļō▒ļĪØ Ļ│╝ņĀĢņØä ļ░śļ│ĄĒĢ┤ņĢ╝ ĒĢ£ļŗż. 2, 3ņäĖļīĆ ņśüņāü ņ£ĀļÅä ĒĢŁļ▓Ģ ņןņ╣śņŚÉņä£ļŖö ņ£äņØś ļō▒ļĪØ Ļ│╝ņĀĢļōżņØ┤ ņČĢņåīļÉśĻ▒░ļéś ņāØļץļÉ£ Ļ▓āņØ┤ ĒŖ╣ņ¦ĢņØ┤ļéś ņØ┤ļĢīļÅä ņłśņłĀņżæ ņśżļźśĻ░Ć Ļ░Éņ¦ĆļÉśņŚłņØä ļĢīļŖö ņ×¼ņ┤¼ņśüņØä ņŗ£Ē¢ēĒĢ┤ņĢ╝ ĒĢśļŖö ļ▓łĻ▒░ļĪ£ņøĆņØĆ Ēö╝ĒĢĀ ņłś ņŚåļŗż.
Ļ│Āņ░░
ņĀĢļ”¼ĒĢśņ×Éļ®┤, ņ╗┤Ēō©Ēä░ ļŗ©ņĖĄņśüņāü ņ£ĀļÅä ĒĢŁļ▓Ģ ņןņ╣śļŖö ņāüļŗ╣ĒĢ£ ņĀĢĒÖĢņä▒Ļ│╝ ĒÜ©ņ£©ņä▒ņØ┤ ņØ┤ļ»Ė ņ×ģņ”ØļÉśņŚłņ£╝ļéś ņé¼ņÜ® ņ┤łĻĖ░ņŚÉ ļō▒ļĪØ ņŗ£Ļ░äņŚÉ ļ¦ÄņØĆ ņŗ£Ļ░äņØä ņåīļ╣äĒĢśĻ│Ā, ņłśņłĀ ņĀäņŚÉ ņŗżņĀ£ ĒÖśņ×ÉņØś ņłśņłĀ ņ£äņ╣śņÖĆ ņ░©ņØ┤Ļ░Ć ņ׳ļŖö ņ╗┤Ēō©Ēä░ ļŗ©ņĖĄņśüņāüņØ┤ ĒĢäņÜöĒĢśļ®░, ņłśņłĀ ņŗ£ņĢ╝ņŚÉ ļČĆņ░®ļÉ£ ņŚ¼ļ¤¼ Ļ░Ćņ¦Ć Ļ│ĀņĀĢļ¼╝ņŚÉ ļīĆĒĢ£ ļ¼┤ņØśņŗØņĀüņØĖ ņČ®ļÅīļĪ£ ņØĖĒĢ£ ļČĆņĀĢĒÖĢņä▒ņØś Ļ░ĆļŖźņä▒ņØ┤ ņĪ┤ņ×¼ĒĢśĻĖ░ ļĢīļ¼ĖņŚÉ ņØ╝ņĀĢ ĻĖ░Ļ░äņØś ĒĢÖņŖĄ ĻĖ░Ļ░äņØ┤ ļ░śļō£ņŗ£ ĒĢäņÜöĒĢśļŗż. ĒĢ£ĒÄĖ, Ēł¼ņŗ£ ņśüņāü ņ£ĀļÅä ĒĢŁļ▓Ģ ņןņ╣śļŖö ņłśņłĀ ņĀä ņśüņāüņØä ĒĢäņÜöļĪ£ ĒĢśņ¦Ć ņĢŖņ£╝ļ®░, ļō▒ļĪØņØ┤ ņé¼ņÜ® ņ┤łĻĖ░ņŚÉļÅä Ļ░äļŗ©ĒĢśĻ│Ā, ņŗżņŗ£Ļ░ä ņśüņāüņØä ņ¢╗ļŖö ņןņĀÉņØä Ļ░Ćņ¦ĆĻ│Ā ņ׳ņ£╝ļéś ĻĖ░ņĪ┤ņØś Ēł¼ņŗ£ ņśüņāüĻĖ░ņØś ņłśņżĆņŚÉ ļö░ļØ╝ ĒĢ┤ņāüļÅä ņ░©ņØ┤Ļ░Ć ļéśĻ│Ā, 2ņ░©ņøÉņĀü ņśüņāüņŚÉ ĻĄŁĒĢ£ļÉ£ļŗżļŖö ļŗ©ņĀÉņØä Ļ░¢Ļ│Ā ņ׳ļŗż. Ēśäņ×¼ ņØ┤ ļæÉ Ļ░Ćņ¦ĆņØś Ļ░ĢņĀÉņØä ĒżĒĢ©ĒĢśĻ│Ā ļŗ©ņĀÉņØä ļ│┤ņÖäĒĢ£ ņ╗┤Ēō©Ēä░ ļŗ©ņĖĄ-Ēł¼ņŗ£ ņśüņāü ļ│ĄĒĢ®ĻĖ░ņØś ļ╣ĀļźĖ ņŗżņÜ®ĒÖöļĪ£ ļ│┤ļŗż ņĀĢĒÖĢĒĢśĻ│Ā ņĢłņĀĢņä▒ņØ┤ ļåÆņØĆ ņłśņłĀ ĻĖ░ļ▓ĢņØ┤ ņ▓ÖņČö ĻĖ░ĻĄ¼ Ļ│ĀņĀĢņłĀņŚÉ ņĀüņÜ®ļÉśņŚłņ£╝ļéś ņé¼ņÜ® ņĀæĻĘ╝ņä▒ņØś ņØ┤ņ£ĀļĪ£ ņČöĻ░ĆņĀüņØĖ Ļ░£ļ░£ņØś ļģĖļĀźņØ┤ ĒĢäņÜöĒĢśļŗż [5].
Ļ▓░ĻĄŁ ņ▓ÖņČö ņłśņłĀņŚÉ ņ׳ņ¢┤ņä£ ņśüņāü ņ£ĀļÅä ĒĢŁļ▓Ģ ņןņ╣śņØś ņĀłļīĆņĀü Ļ░Ćņ╣śļŖö ņĀĢĒÖĢļÅäņØś Ļ░£ņäĀ, ļ░®ņé¼ņäĀ Ēö╝ĒÅŁņØś Ļ░ÉņåīņÖĆ ĒÜ©ņ£©ņä▒ņØś ĻĘ╣ļīĆĒÖöļØ╝Ļ│Ā ļ│╝ ņłś ņ׳ļŗż. 3ņäĖļīĆņŚÉ Ļ▒Ėņ╣£ ĒĢŁļ▓Ģ ņןņ╣śņØś ņ¦äĒÖöļŖö ņØ┤ ņäĖ Ļ░Ćņ¦Ć ņÜöņåīļź╝ ņČ®ņĪ▒ņŗ£ĒéżĻĖ░ ņ£äĒĢ┤ņä£ ņ¦ĆņåŹņĀüņØĖ ļ░£ņĀäņØä Ļ▒░ļōŁĒĢ┤ ņś© Ļ▓āļÅä ņé¼ņŗżņØ┤ļŗż. ļ¼┤ņŚćļ│┤ļŗżļÅä ņé¼ņÜ®ņ×ÉņØś ņ×ģņןņŚÉņä£ņØś ņłśņłĀ ņĀä ņśüņāüņ×ÉļŻīņØś ņāØļץĻ│╝ ļō▒ļĪØ ņĀłņ░©ņØś Ļ░äņåīĒÖö ļ░Å ņ╗┤Ēō©Ēä░ ļŗ©ļ¦ÉĻĖ░ ņé¼ņÜ®ņØś ņÜ®ņØ┤ņä▒ņØĆ ĻĘĖļÅÖņĢł ĻĖ░ĻĄ¼ņØś ņé¼ņÜ®ņØä Ļ║╝ļĀżĒĢśļŹś ņ▓ÖņČö ņłśņłĀņ×ÉļōżņØś ņŗ£ņäĀņØä ļÅīļ”¼ļŖö ļŹ░ ņżæņÜöĒĢ£ ņŚŁĒĢĀņØä Ē¢łļŗż. ļ░®ņé¼ņäĀ Ēö╝ĒÅŁņØś Ļ░Éņåī ļśÉĒĢ£ ņłśņłĀņŗż ļé┤ņØś ņØśļŻīņ¦äņØĆ ļ¼╝ļĪĀ ĒÖśņ×ÉņŚÉĻ▓īļÅä ĻĘĖ ņĢłņĀĢņä▒ņØä ņČ®ļČäĒ׳ ņØĖņĀĢļ░øņĢśļŗżĻ│Ā ļ│╝ ņłś ņ׳ļŗż. ĒĢśņ¦Ćļ¦ī ņĢäņ¦üļÅä ņČöņĀü ņןņ╣śņØś Ļ░£ļ░£, ņ╗┤Ēō©Ēä░ ņÜ┤ņśü ņ▓┤Ļ│äņØś Ē¢źņāü, ĻĖ░ĻĄ¼ņØś Ēü¼ĻĖ░ ņČĢņåī, Ļ░ĆĻ▓®ņØś ĒĢ®ļ”¼ĒÖö ļō▒ Ļ░£ņäĀņØś ņŚ¼ņ¦ĆĻ░Ć ļé©ņĢä ņ׳Ļ│Ā, ņČöĒøä ņØĖĻ│Ąņ¦ĆļŖź, ļĪ£ļ┤ć ņłśņłĀ ļ░Å ņ”ØĻ░Ģ, ĒÖĢņן ĒśäņŗżņØś ĻĖ░ņłĀĻ│╝ ņ£ĄĒĢ®ņØä ĒåĄĒĢ┤ ļ│┤ļŗż ļåÆņØĆ Ļ░Ćņ╣śļź╝ ņ░ĮņČ£ĒĢ┤ņĢ╝ ĒĢĀ ņłÖņĀ£Ļ░Ć ņ׳ļŗż.
Ļ▓░ļĪĀ
ņśüņāü ņ£ĀļÅä ĒĢŁļ▓Ģ ņןņ╣śņØś ĻĄ¼ņä▒ņÜöņåīņÖĆ ņé¼ņÜ® ņĀłņ░©ņØś ņØ┤ĒĢ┤ļŖö ņ▓ÖņČö ņłśņłĀņŚÉ ņ׳ņ¢┤ņä£ ļ│┤ļŗż ņĀĢĒÖĢĒĢśĻ│Ā ņĢłņĀäĒĢśļ®░ ĒÜ©ņ£©ņĀüņØĖ ņłśņłĀ ļ│┤ņĪ░ ļÅäĻĄ¼ņØś ĻĖ░ļ▓ĢņØä ņŖĄļōØĒĢśĻ│Āņ×É ĒĢśļŖö ļŹ░ ĻĘĖ ņ▓½ ļ▓łņ¦Ė ļ¬®ņĀüņØ┤ ņ׳ļŗż. ļśÉĒĢ£ Ļ░ü ļé┤ņÜ®ņØä ņśüņāü ņ£ĀļÅä ĒĢŁļ▓Ģ ņןņ╣śņØś ĻĖ░ļ│Ė ņ×æļÅÖ ņøÉļ”¼ļĪ£ņä£ ņØ┤ĒĢ┤ĒĢśļŖö Ļ▓āņØĆ Ļ▓░ĻĄŁ ņØ┤ļź╝ ĻĖ░ļ░śņ£╝ļĪ£ ņ¦äĒÖöĒĢśĻ│Ā ņ£ĄĒĢ®ĒĢśļŖö ļ»Ėļל ĻĖ░ņłĀņØä ņØĖņ¦ĆĒĢśļŖö ļŹ░ ĒĢäņłś ņÜöĻ▒┤ņØ┤ ļÉĀ Ļ▓āņØ┤ļŗż.
 PDF Links
PDF Links PubReader
PubReader ePub Link
ePub Link Full text via DOI
Full text via DOI Download Citation
Download Citation Print
Print






